
Une tendance généralisée dans les moyens de transport est l’introduction de fonctions d’assistance à conduite voire de conduite autonome. Qu’il s’agisse des trains, avions ou voitures, des niveaux successifs d’automatisation transfèrent progressivement la responsabilité du conducteur vers le véhicule. Cet article de blog en donne une brève analyse comparative en mettant l’accent des stratégies permettant de garder l’humain dans la boucle que ca soit au moment de la conception ou lors du fonctionnement de ces systèmes.
Cet article est également disponible en anglais dans le numéro spécial d’ERCIM News d’avril 2017 consacré aux véhicules autonomes
La mobilité est une dimension clé de notre vie quotidienne à la fois pour le travail et pour les obligations personnelles. Garantir un transport sécuritaire, rapide, prévisible et abordable est très compliqué à cause de la charge élevée de nos réseaux de transport, surtout aux heures de pointe. Le niveau d’efficacité qui peut être atteint est souvent limité par le conducteur humain ; Les contraintes inhérentes étant le temps de réaction (un temps de réaction plus long provoque un trafic congestionné), la fiabilité (90% des accidents de voiture sont le résultat d’erreurs humaines) et aussi le coût économique. Les compagnies aériennes, les entreprises ferroviaires et les constructeurs automobiles ont donc travaillé sur des solutions de façon à aider le conducteur en réduisant les actions nécessaires de sa part et en envisagent même d’atteindre l’objectif ultime d’une conduite sans conducteur.
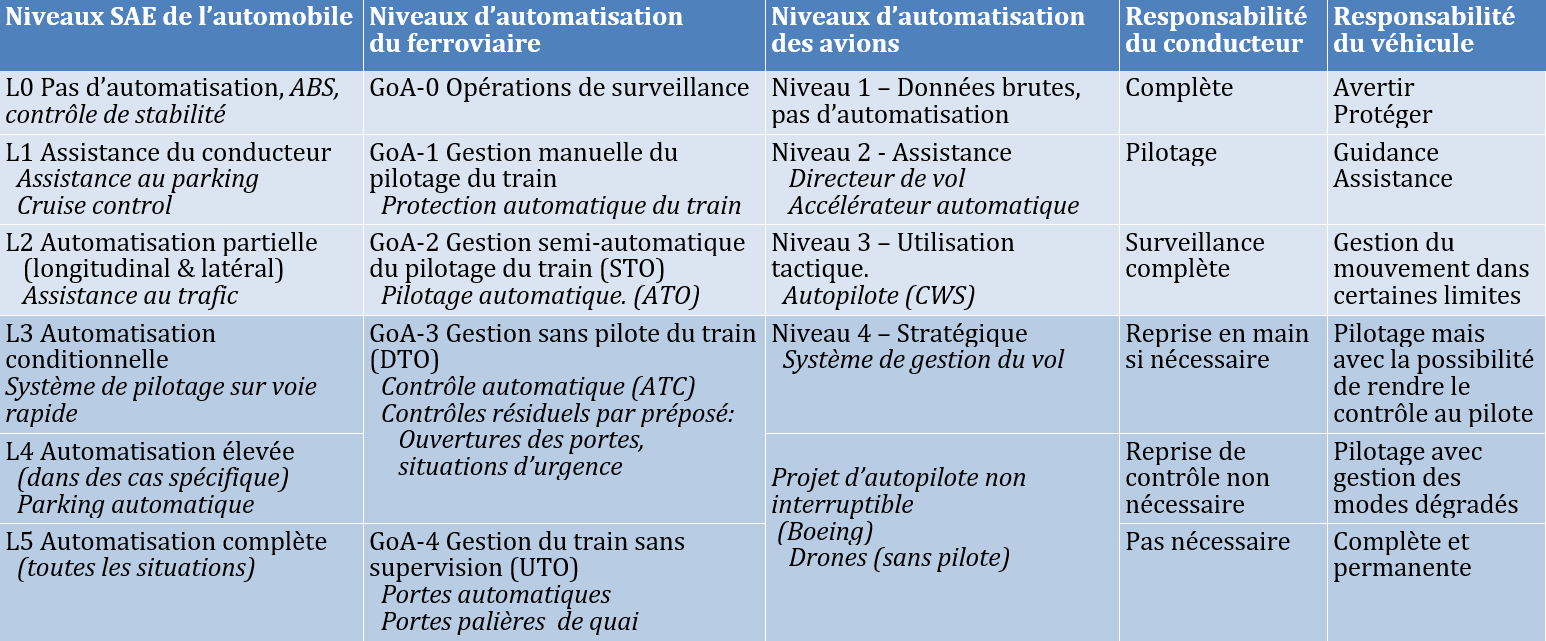
Différents niveaux d’automatisation ont été définis dans chacun des domaines liés au transport. Le tableau 1 donne un aperçu comparatif de ces niveaux avec les caractéristiques d’automatisation associées et la répartition respective des responsabilités entre le système et le conducteur / pilote humain. La classification automobile "SAE" a été utilisée comme cadre de référence pour l’alignement des niveaux de fonctionnement ferroviaire (GoA) et les niveaux d’automatisation des avions. Le niveau le plus bas est la conduite entièrement manuelle, même si ce niveau inclut généralement certains systèmes de protection garantissant la sécurité. Les véhicules du niveau suivant fournissent une assistance dans des tâches spécifiques ou limitées dans le temps. Alors que les voitures ne parviennent actuellement qu’à une automatisation partielle, les systèmes ferroviaires et les avions ont déjà atteint des niveaux beaucoup plus élevés tels que des lignes de métro entièrement autonomes, par exemple.
L’industrie automobile considère, actuellement, la transition critique vers un niveau où la voiture est capable de conduire elle-même de manière à ce que le conducteur n’aie plus besoin de diriger, freiner, accélérer ou regarder la route. Cependant, comme le système ne peut pas faire face à toutes les situations, le conducteur doit être prêt à reprendre le contrôle à la demande du véhicule. C’est très compliqué, car plusieurs obstacles doivent être soigneusement traités [1]. Nos travaux sur ce sujet reposent sur des techniques d’ingénierie des exigences [2], basées à la fois sur les caractéristiques du conducteur humain et sur la transposition de problèmes connus venant d’autres domaines. Il en résulte, dès lors, quelques questions intéressantes à aborder :
À partir d’une telle analyse, des stratégies spécifiques peuvent être conçues et expérimentées. L’ensemble du système ne doit pas être considéré comme statique, mais plutôt comme une coopération évolutive entre le conducteur et le véhicule, l’apprentissage se produisant des deux côtés. À cet égard, les techniques d’apprentissage automatique (« machine learning ») peuvent jouer un rôle important pour s’assurer que le conducteur et le système fonctionnent de manière optimale ensemble [3]. Avec l’avènement de la voiture connectée, cette expérience de conduite (en particulier les scénarios problématiques) sera facilement collectée, analysée et améliorée. Nos prochains travaux porteront plus spécifiquement sur le domaine ferroviaire dans le cadre des objectifs du projet INOGRAMS liés à l’exploitation automatisée des trains, en particulier pour atteindre une efficacité plus élevée.
[1] Casner, S.M et al., The Challenges of Partially Automated Driving Communications of the ACM, 59(5):70-77, 2016
[2] van Lamsweerde, A, Requirements Engineering : From System Goals to UML Models to Software Specifications, Wiley, 2009.
[3] Koopman, P. and Wagner, M., "Challenges in Autonomous Vehicle Testing and Validation," SAE Int. J. Trans. Safety 4(1):15-24, 2016.