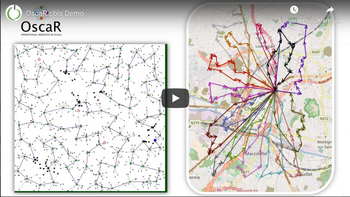
This video illustrates two potential use cases of OscaR.CBLS as optimisation tool.
Date: 6 May 2020
Expertises
Asset
Author
OscaR is a software framework that includes the three major optimization engines that are commonly used in operational research, namely: constraint programming, constraint-based local search, and MIP. The goal of OscaR is to address industrial problems, by making these solvers available, efficient and easy to use. The engines of OscaR have similar API, making them easy to use and hybridize for complex applications.
On the Left: Optimization of delivery by drones taking off from a moving truck.
In this example, we want to deliver packages by drones, they take off from a specially equipped truck, make the delivery and return to the truck to load the next package. Given the delivery points and all possible parking spaces on the map, we must jointly optimize:
Right: Optimization of home care nurse schedules.
A team of nurses uses cars to provide care to various patients across the city. The nurses start their journey at the hospital and return there in the evening. A shift lasts 8 hours and these hours include travel time and the time spent at the patient’s home providing care. The optimization allows you to:
View online : https://www.cetic.be/Oscar-CBLS?lang=en